Das Herz des Mono-UKW-Radios ist der Chip TDA7021. Er beinhaltet ein FLL (frequence locked loop), eine integrierte Zf-Erzeugung von 76 kHz ohne externe Filter und ein Feldstärkesignal. Die Empfängerempfindlichkeit beträgt 4 uV/m. Der Audioverstärker liefert 5 W an den Visaton Lautsprecher FR 8 JS. Der Bau des Holzgehäuses gehört zum Umfang des Projektes.
Inhaltsverzeichnis
SchaltbildUKW-Empfänger
Audio
Netzteil
Aufbau UKW-Empfänger
Aufbau gesamte Elektronik
Holzgehäuse
Drehkondensator und Bodenplatte
Innenkonstruktion Bogenaufbau und 'blinde' Lautsprecherbefestigung
Bogenaufbau und Seitenwände
Bogen bearbeitet und Rückwand
Downloads

Schaltbild
Die Schaltung besteht aus dem UKW-Empfänger, der Feldstärkeanzeige, der Klangregelung, dem Endverstärker und dem Netzteil. |
| Schaltplan UKW-Radio |
Download Eagle-Datei UKW-Raqdio.sch
UKW-Empfänger
Herz ist das hochintegrierte IC TDA7021T. Der Empfangskreis ist aufgebaut aus einer Luftspule, dem Abstimmkondensator 8 ...25 pF und den Trimmkondensatoren, mit denen der nutzbare Frequenzbereich eingestellt wird. Der Abstimmkondensator (vom RadioFlohmarkt) ist mechanisch 1:3 untersetzt, das erlaubt eine feinfühlige Senderabstimmung. Die Daten der Luftspule sind im Schaltplan angegeben. Die Drahtenden sollten so kurz wie möglich sein. Evtl. muss ein 'Klingeln' durch Verkleben verhindert werden. Die Antenne ist symmetrisch angekoppelt (Drahtschleife, ca. 1,5 m). Das IC ist entsprechend Datenblatt für Mono beschaltet, die Mute-Funktion zwischen den Sendern ist ausgeschaltet. Dadurch ergibt sich eine Eingangsempfindlichkeit von 4uV/m was einer recht guten Empfangsleistung entspricht. Es werden ca. 15-20 UKW-Stationen empfangen. Die Zwischenfrequenz ist mit 76 kHz sehr niedrig und wird intern erzeugt, so dass keine Zf-Filterspulen nötig sind. Das IC besitzt einen Feldstärkeausgang mit dem man über den Transistorverstärker eine LED treiben kann. Die Empfindlichkeit wird so eingestellt, dass die blaue LED bei schwachen Sendern gerade noch flackert.
Audio
Das Nf-Signal wird einem Klangregel-Netzwerk zugeführt. Dieses ermöglicht, das Klangverhalten des UKW-Radios auf die persönlichen Bedürfnisse einzustellen. Der Endverstärker TDA7056B ist ein BTL-Typ, so dass man keinen großen Elko benötigt. Die Ausgangsleistung beträgt bei 12 V ca. 5 W. Der Ruhestrom beträgt nur ca. 10 mA, so dass der Verstärker bei Zimmerlautstärke 'cool' bleibt. Die Lautstärke ist DC gesteuert. Der verwendete Lautsprecher FR8JS-8 von Visaton hat bis in die Tiefen ein ausgeglichenes klares Klangbild
Netzteil
Die Spannungsversorgung erfolgt per Steckernetzteil 15/1A von PHIHONG. Endverstärker, Klangregelnetzwerk und Feldstärkeanzeige werden unsymmetrisch mit 12 V versorgt, der Empfänger mit 3 V.
Download Eagle-Datei UKW-Raqdio.sch
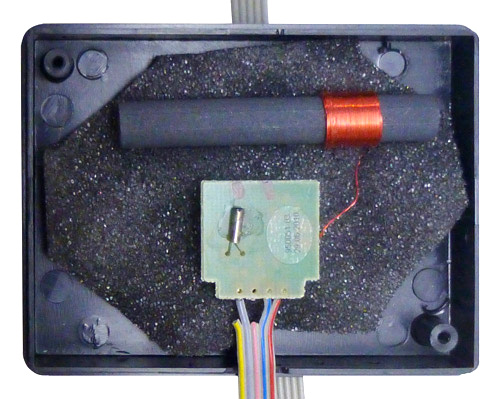
Aufbau UKW-Empfänger
Um parasitäre Kapazitäten zu vermeiden, sind die Verbindungen möglichst kurz zu halten. Im unteren Drittel der Platine sieht man den noch nicht fertig aufgebauten Verstärker für die Feldstärke. |
| Empfangskreis und Aufbereitung Signalstärke |
Aufbau gesamte Elektronik
Links oben befindet sich die Spannungsversorgung, in der Mitte oben die Klangregelung, oben rechts der Endverstärker und unten der Empfänger.
 |
| Ansicht gesamte Elektronik |
Holzgehäuse
Die Frontplatte und der Boden sind aus 5 mm Pappel-Sperrholz hergestellt, die Seitenteile aus 10 mm Holzplatten. Der runde Bogen wurde mit einer Innenkonstruktion aufgebaut, abgeschliffen und incl. der Seitenteile in einem Stück furniert. Die Schlitze für den Lautsprecher wurden an den Enden gebohrt und dann mit der Laubsäge ausgesägt. Nach Ende der Holzarbeiten wurde das Gehäuse mit Buche gebeizt und schließlich mit klarem, wasserlöslichem Lack lackiert. Die Rückwand besteht aus Presspappe. Diese nimmt den DC-Stecker und die Antennenbuchsen auf. Die Lautsprecherbefestigung erfolgt 'blind' auf der Rückseite, so dass auf der Frontseite keine Schrauben zu sehen sind. Die Konstruktion muss natürlich entsprechend den verwendeten Bauteilen (z. B. Drehkondensator) angepasst werden.
 |
| Zeichnung Holzgehäuse |
Download CorelX6-Datei ukw_Holzgehaeuse1.cdr
Bauphasen
Drehkondensator und Bodenplatte
Drehkondensator mit mechanischer Untersetzung 1:3 und Drehknopf vom 'Radioflohmarkt'.
 |
| Montage Drehkondensator |
Innenkonstruktion Bogenaufbau und 'blinde' Lautsprecherbefestigung
Der Bogenaufbau muss möglichst genau rechtwinklig zur Frontplatte sein. Die Rippen sind leicht überlappt und mit reichlich Holzleim abgedichtet. Auch der Übergang zur Frontplatte wurde nachträglich mit Leim abgedichtet. Der Lautsprecher muss unbedingt gut befestigt sein und die frontseitige Dichtung muss plan auf der Frontplatte aufliegen.
 |
| Bogenkonstruktion |
Bogenaufbau und Seitenwände
Ein Probebetrieb darf jetzt schon mal sein. Rechts die blaue LED ist die Feldstärkeanzeige, darunter die Senderabstimmung. Links ist die Power-LED, darunter der Lautstärkeknopf. In der Mitte befindet sich der Ein/Aus-Schalter.
 |
| Der Bogen ist noch nicht bearbeitet |
Bogen bearbeitet und Rückwand
Der Bogen ist jetzt bearbeitet. stirnseitig ist noch ein sauberer Abschluss aufgebracht, der dafür sorgt, dass die Rückwand möglichst luftdicht abschließt. Das beeinflusst den Klang wesentlich. Die Rückwand ist mit Rippen stabilisiert und durch Schaumstoff gedämpft.
 |
| Bogen bearbeitet |
Downloads
Download Eagle-Datei UKW-Radio.sch
Download Schaltplan UKW-Radio.pdf
Download Holzgehaeuse.pdf
Download CorelX6 Datei Holzgehaeuse.cdr